Recently, Yuan Qicong, a media person, measured the enjoyment of S9 on public roads. Among them, when passing through a section of road with slope, Yuan Qicong said that after the vehicle flew down the slope, it was "unable to keep straight and the whole vehicle was biased to one side", which triggered a heated discussion in the circle, and a group of car bloggers started to discuss and even retest.
In this regard, Xiangjie Automobile issued a statement in Guanwei on August 25, saying that in this "test", the driver took the initiative to intervene, artificially turned the steering wheel to the right, and then corrected it to the left, causing the vehicle to sway. After repeated tests under the same conditions, Enjoying S9 can keep driving in a straight line without the driver’s active intervention in the steering wheel. Regarding the official response of Enjoy Car, Yuan Qicong subsequently issued a number of Weibo’s statements that "it can be self-certified" and "it will fully respond". On the evening of 25th, Yuan Qicong responded by opening the live broadcast. Soon after, he said that the live broadcast was deleted and Weibo was banned.
Author threeMiaojian research institute

Miao Jian information analysis found that
The video was deleted and banned, and the official statement of "first release and then change" intensified the unfavorable speculation on the brand:The discussion of Feipo dispute was initially confined to the car circle, and car bloggers expressed their views to each other, mainly the debate between Yuan Qicong and other car bloggers. After the official response from the industry, the financial media began to report this matter, and Yuan Qicong even broadcast hard and shouted "sue me" in the industry. Some netizens noticed that Enjoy World revised the contents of two statements, but Weibo didn’t show "edited", which triggered doubts about the improper use of the brand. In addition, Yuan Qicong later claimed that the live broadcast was deleted and banned, which even angered public sentiment. Overlapping the words "Huawei" and "country" in the statement without trace, further causing suspicion and fermenting doubts about the brand’s cover-up of the truth.

Figure 1: Comparison between before and after editing the statement of enjoyment.
There are many secondary risks when car companies deal with evaluation public opinion;In the face of disputes in car reviews, car companies can choose to take the initiative to deal with them, that is, clarify the imprecision of the evaluation through official channels, but at the same time, it is likely to cause secondary public opinion, such as data security disputes caused by retrieving background data, and questioning the quality truth by brand endorsement; If a car company chooses cold treatment and does not publicly respond to the controversial points in the evaluation, it will also easily lead to the fermentation and upgrading of negative public opinion on product quality defects. If the judgment is not in place and the clarification is not timely, it will easily lead to the negative label of the car and the loss of brand reputation.
Lack of standardization of automobile evaluation brings troubles to automobile enterprises;In recent years, the accidents of new energy vehicles are high, consumers pay more and more attention to the safety performance of vehicles, and various "wild assessments" of vehicles initiated by media bloggers are also emerging one after another. Due to the lack of uniform standards for automobile evaluation and the different real purposes behind the evaluation, these evaluations are often not professional and rigorous, and it is difficult to provide reference value for consumers. Instead, they incite emotions, breed rumors, and trigger public opinion attacks on brands, which in turn affects the healthy competition between automobile enterprises and also brings the burden of public opinion response to automobile enterprises.
Accuse malicious fraud in time, accept and improve reasonable opinions;Combined with the current multi-party voice, it is impossible to determine whether Yuan Qicong has improper operation for the time being, but in the confrontation between the two sides, the handling method of suspected official ban undoubtedly aggravated the public opinion’s harsh criticism of the brand. Recently, the "crash test between Xiaomi SU7 and Extreme Krypton 001" also attracted the attention of the car circle. The video showed that after the collision, Xiaomi SU7 was cut off and the door could not be opened. Then Xiaomi Automobile responded that "the test was not rigorous", and the blogger apologized. The official also blamed the "paid test". Whether the test method is unreasonable, reasonable opinions are put forward, or subjective malicious fraud, car companies should use different ways to deal with different evaluation properties.
Brand word of mouth plays an important role in the evaluation of public opinion;Compared with the official response in the S9 test and the crash test of Krypton millet, Krypton was influenced by the public opinion of "revision to protect the rights of old car owners", and there were still many negative voices under the response. Enjoy the world because there is a joint relationship with Huawei brand, influenced by historical negative public opinion, and its official response is mainly to support Yuan Qicong, which is mostly unfavorable to the brand. Under the response of Xiaomi Automobile, there are many voices supporting the prosecution of Xiaomi Automobile. Brand historical public opinion and word-of-mouth accumulated on weekdays affect the overall trend of evaluation public opinion to some extent.
01
The context and communication trend of public opinion
According to public opinion monitoring data of Miaojian Information, from 18:08:00 on August 20, 2024 to 18:07:59 on August 27, 2024, there were 12,400 articles related to "Yuan Qicong’s evaluation and enjoyment of S9" in the whole network, and the public opinion heat index MJSI was 349.7. Related topics # Enjoy the World Response S9 "High-speed Flying Slope" Test #, # Yuan Qicong was banned by Weibo, and the car critic Yuan Qicong shouted "Please sue me" in Enjoy the World #, etc., were listed on the hot search list of Weibo, Zhihu and today’s headlines for 5 times, with a cumulative duration of 24 hours and the highest ranking of 7.
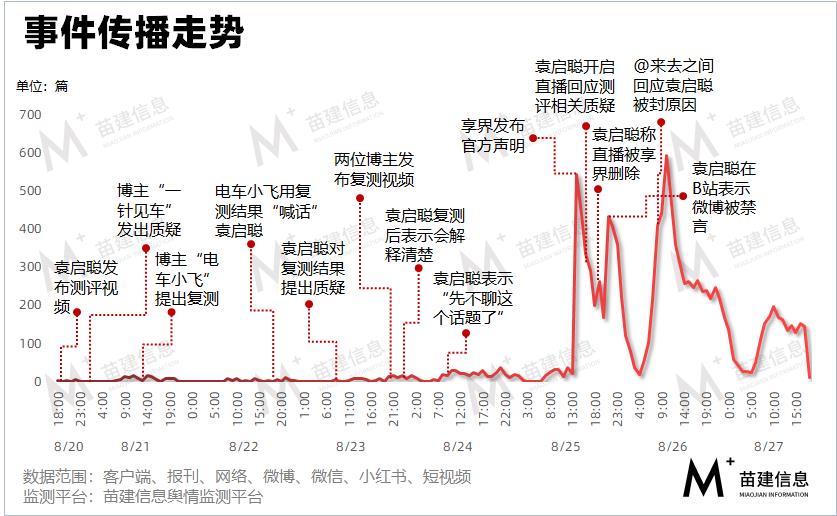
Figure 2: The trend of public opinion communication
At 18:08 on August 20th, senior car critic @ Yuan Qicong released a long evaluation video with the caption "Let me sincerely and honestly evaluate the enjoyment of S9." Among them, Yuan Qicong said that after the vehicle flew downhill, "it was impossible to keep driving in a straight line and the whole vehicle was biased to one side".

Figure 3: Evaluation video
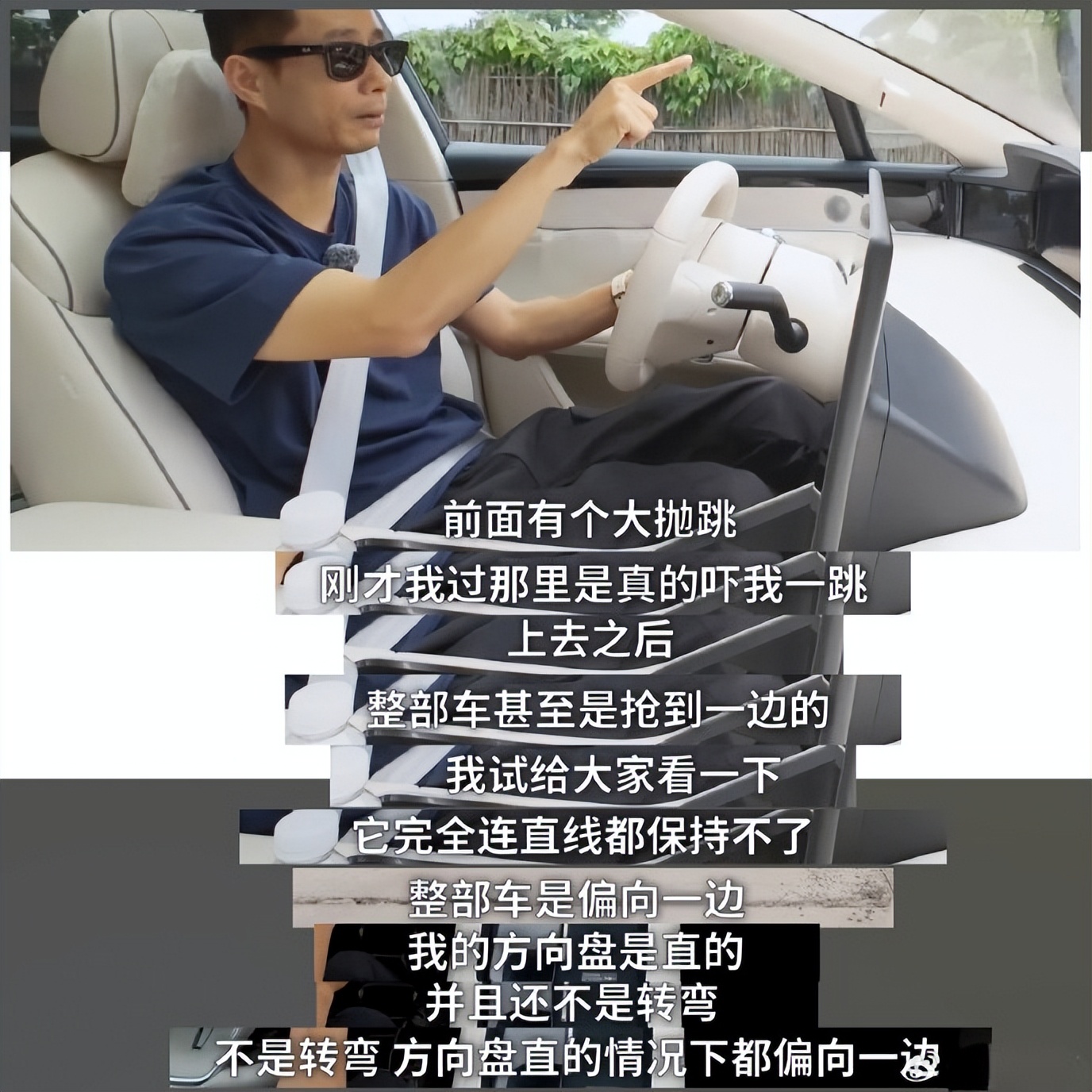
Figure 4: Yuan Qicong comments in the evaluation.
From the evening of August 20 to the morning of August 21, there were discussions on the "flying slope phenomenon" in the evaluation video from the media. Some people questioned the rigor, while others supported Yuan Qicong’s point of view.
At 00:52 on August 21st, the car blogger @ 京京京京京京 questioned Yuan Qicong’s test method, thinking that he might have mishandled the test, took the switch over the hurdle and stepped on the switch deeply on the way.
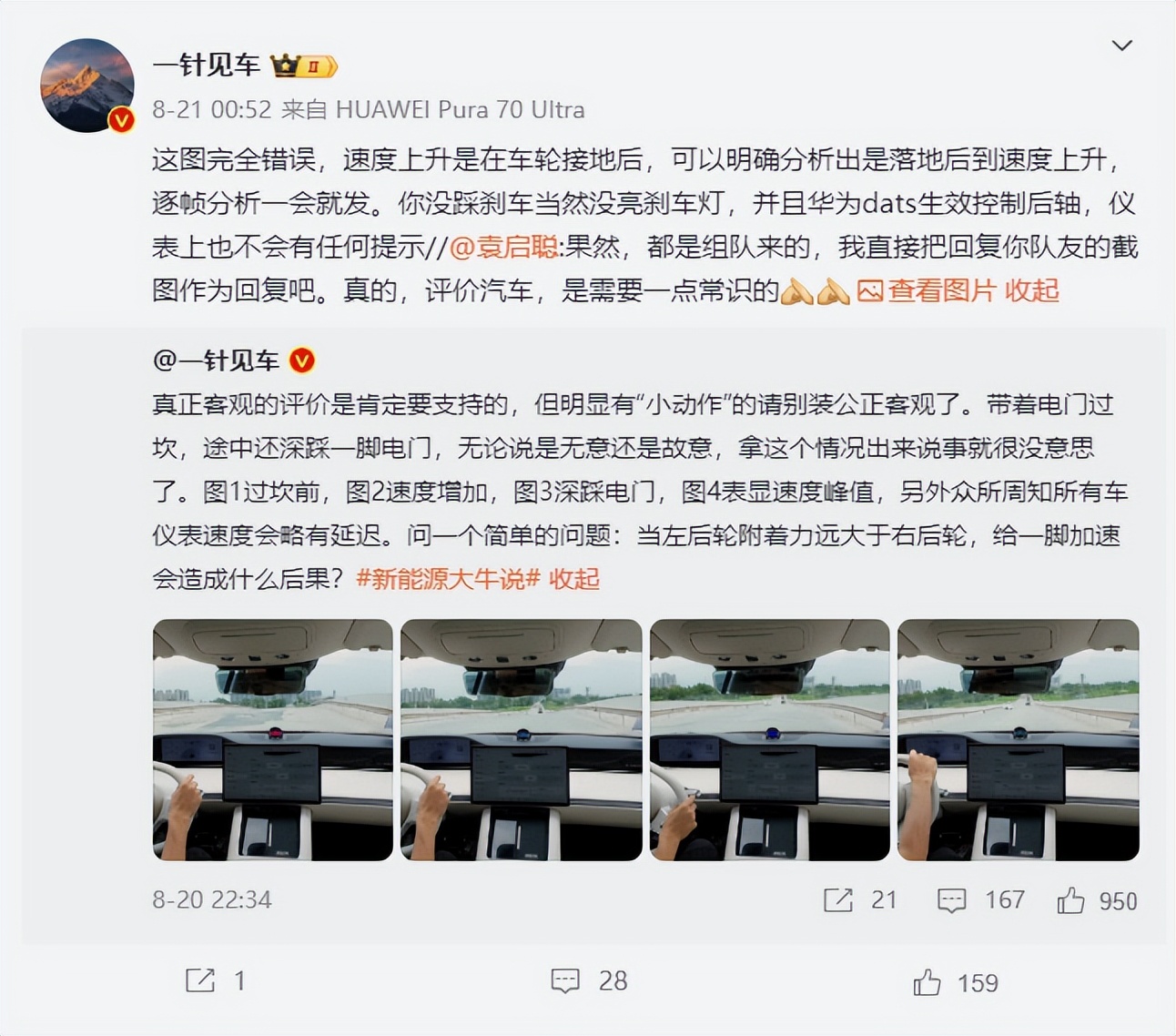
Figure 5: Bloggers question when they see the car.
At 12:47 on August 21st, car blogger @ Tram Xiaofei also questioned the test results, and proposed to go to the test site with @ One Needle to retest, and bring a Mercedes-Benz S450L as a comparison test.
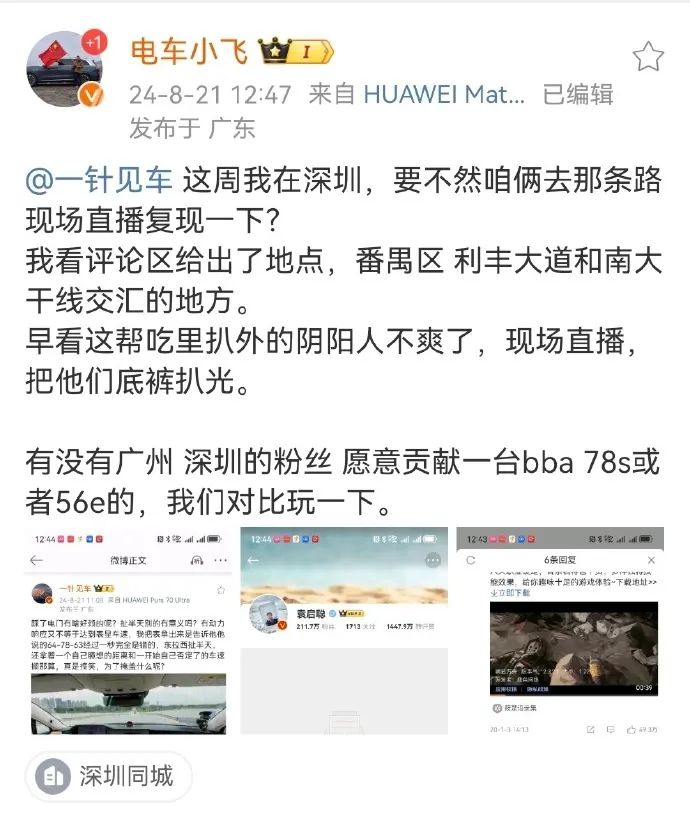
Figure 6: Blogger Tram Xiaofei proposes retest.
At 19:48 on August 22nd, the tram Xiaofei sent out the driving data of Weibo’s public retest, calling Yuan Qicong from a distance.

Figure 7: Tram Xiaofei releases retest data and calls Yuan Qicong.
At 9:38 on August 23rd, Yuan Qicong questioned the test results of two bloggers and pointed out that "there was no real video".
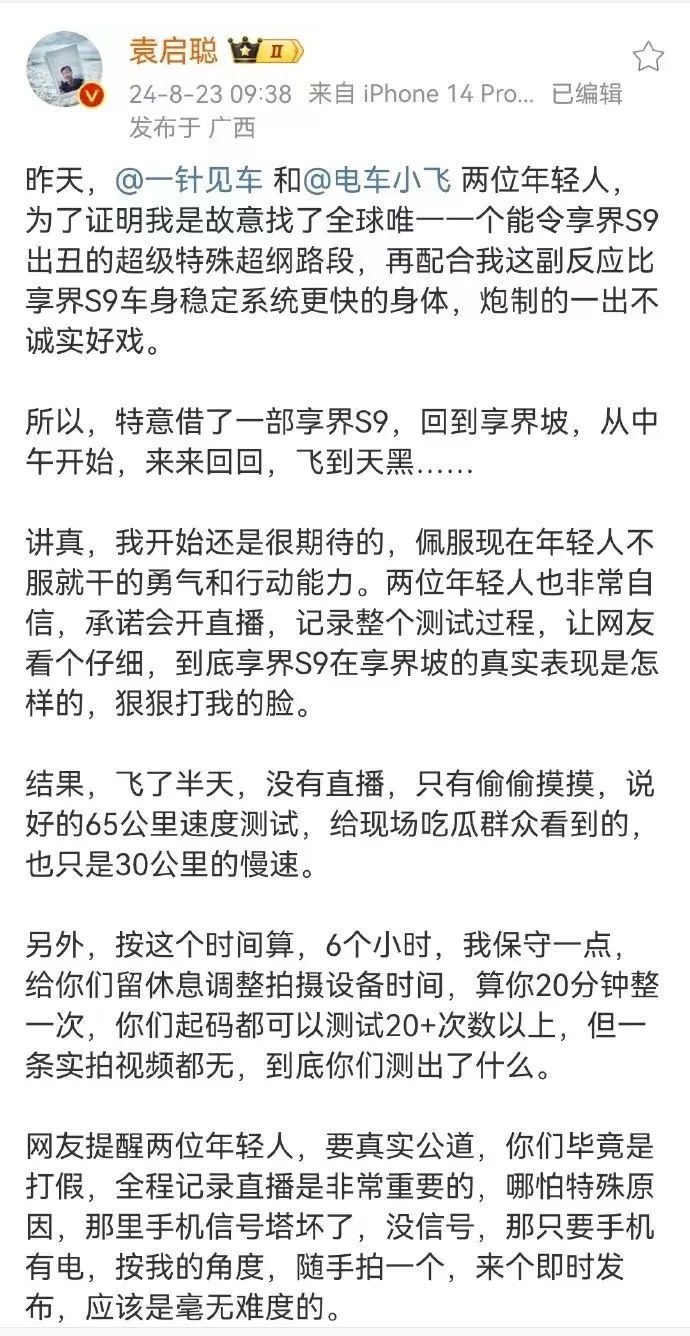
Figure 8: Yuan Qicong questioned the retest results.
At 20:25 on August 23rd, a car at a glance and a tram Xiaofei released in-car and out-of-car videos of Enjoy the World S9 flying downhill three times in Weibo and Tik Tok, and there was no bumpy turning phenomenon in the video.

Fig. 9: A retest video is released at a glance.
At 22:51 on August 23, Yuan Qicong once again conducted a flying slope test on the enjoyment world S9, and said that he "probably knows what the situation is and will explain it clearly".
Figure 10: Yuan Qicong said that he would explain clearly.
At 10:48 on August 24th, Yuan Qicong sent a message to Weibo, saying "Let’s not talk about this topic for the time being". At the sight of a car and a tram, Xiaofei sent a message to Weibo, claiming that Yuan Qicong had blacked it out. The debate between car bloggers is temporarily over.
Figure 11: Yuan Qicong said not to talk about this topic for the time being.
At 14:00 on August 25th, Weibo, the official of Enjoy Car, issued a statement, saying that the test conclusion was not objective and rigorous, and the driver took the initiative to intervene and turned the steering wheel artificially.
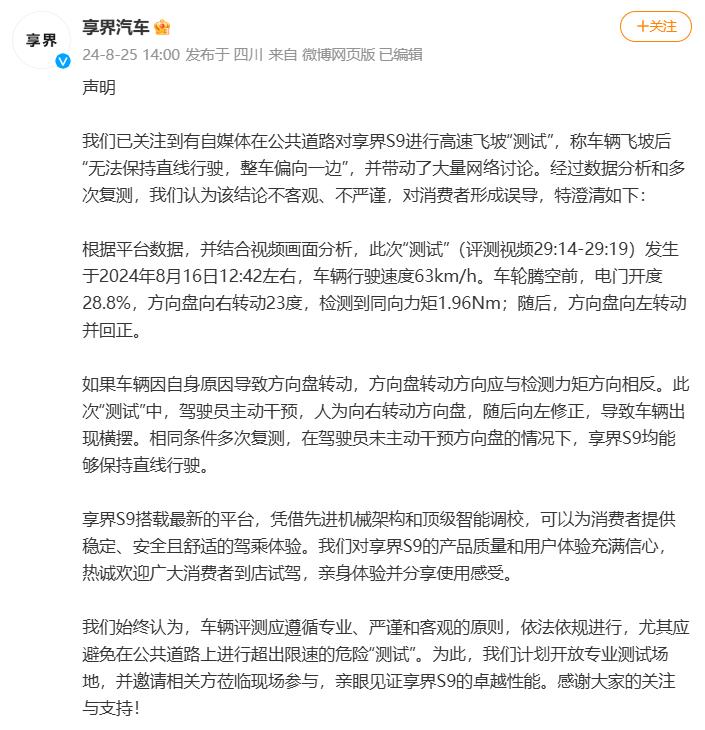
Figure 12: Enjoy the official Weibo response.
At 14:43 on August 25, Yuan Qicong forwarded the official statement of Enjoy World Automobile, saying, "I have seen this statement. There are all scientific basis for why the steering wheel is deflected, and I will fully respond next week."
At 14:47 on August 25, Yuan Qicong forwarded the official statement of Enjoy World Automobile again, saying, "No, I’m going back to the company to shoot now."
At 17:00 on August 25, Yuan Qicong explained in the live broadcast that the car suddenly flew through this flying slope and naturally grasped the steering wheel, only to find some hidden problems such as vehicle deflection. Finally, it is pointed out that although the enjoyment of the world is for explanation, it is an infringement to directly disclose the vehicle data without the consent of the owner, and the right of prosecution is reserved.
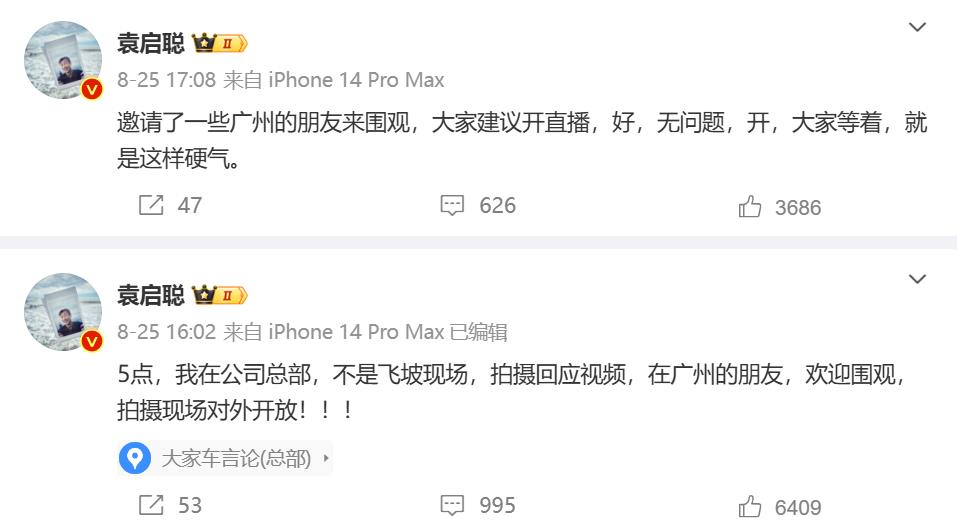
Figure 13: Yuan Qicong’s Live Preview
At 19:50 on August 25th, under the official statement of Enjoy World Automobile, Yuan Qicong commented and questioned "Why did the live broadcast be deleted?".
At 20:44 on August 25th, Yuan Qicong responded to Weibo’s ban.
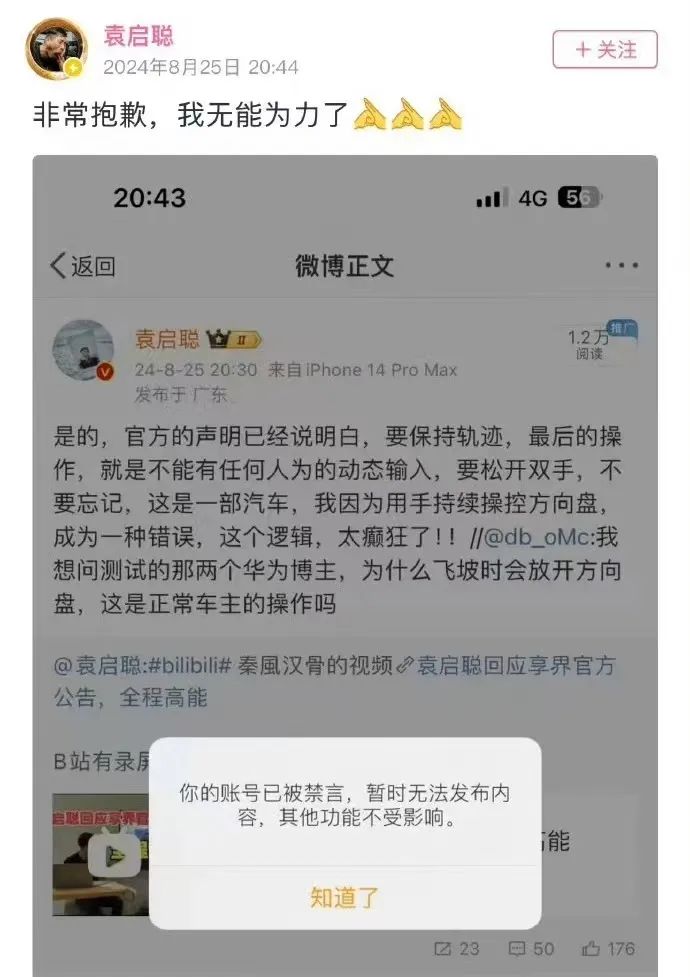
Figure 14: Yuan Qicong said in bilibili that Weibo was banned.
At 8:22 on August 26th, Sina Weibo @ came and went to respond to the reason why Yuan Qicong was blocked.

Figure 15: Response between coming and going
At 8:31 on August 26th, Yuan Qicong posted a dynamic message on his account in bilibili, saying that he would take a week off and rest for a while.
Figure 16: Yuan Qicong said in bilibili that it is indisputable.
On September 2nd, at the 2024 Chengdu Auto Show, someone asked how to treat the S9 flying slope incident. Yu Chengdong said, "I think professionals should participate in the test, and we need professionals to watch it. Because there are still some people who do bad things in the society now, if you pay money, you will be praised, and if you don’t pay money, you will be criticized, but I want professional people to see it. Some people collect money. If you can’t get the money, come and fuck you. But I think for us, we still have to do a good job in products, real product quality and product experience. Therefore, it depends on real professionals. I think we still have to believe in the power of professionalism in this respect. "
02
Views of all parties
(A) the mainstream media
Public opinion mainly focuses on the industry from the media and netizens. The mainstream media mainly reported this matter after the announcement of Enjoy World, and did not comment.
Interface News: Enjoy the car response from the media enjoy the S9 high-speed flying slope "test" conclusion: not objective and not rigorous.
Beijing business today: Can’t you keep driving in a straight line after the flying slope test of Xiangjie S9 vehicle? Enjoy Car Response: This conclusion is not objective and rigorous.
CBN: Enjoy the car’s response to S9 flying slope test: not objective and rigorous.
Southern Metropolis Daily: Enjoy the world’s response to "the blogger’s evaluation of S9′ s body instability when flying downhill": the driver intervened in the steering wheel.
(2) From the media
Mainly based on the industry’s self-media comments, it mainly involves combing the incident, analyzing the rationality of evaluation, and expressing opinions on the coping style of car companies.
Headline of public relations: As far as the outcome of the incident is concerned, both sides have lost both sides. Enjoy the reputation and sales of S9, and it is also suspected of "stealing user data privately" and "manipulating public opinion"; And Yuan not only banned Weibo, but also lost the image of "objective" and "fair" car critics accumulated over the years.
Front page of science and technology: In the evaluation dispute of Xiaomi SU7, Xiaomi officially provided specific data support for key issues, which strongly refuted the appraisers’ conclusions and effectively eliminated the public’s doubts. Although the official response of Enjoy World also provides some data support, this data can’t fully prove that Enjoy World S9 chassis training is excellent enough in the eyes of some other car KOL and car enthusiasts.
Sharp comments in the car industry: Although every car company has repeatedly stressed the need for "healthy competition" and refused to "maliciously step on it", can it really be done? So, are these folk "pheasant evaluation" pure technical verification? Perhaps only those car manufacturers themselves can reveal the answer for us.
Car information: all automobile products are not perfect. No matter who made them or who empowered them, they must have shortcomings. I am afraid that an automobile product will no longer be an industrial product in the public opinion.
Mr. Former: Cover your mouth! Is the most resentful behavior! Face is given by others, you do things properly, your products are excellent, and the whole world respects you and gives you face. I lost my face myself, the product was not good, and I was sneaky. The whole world didn’t trust you and looked down on you.
Weibo-Xie Zonghuan: Creating confrontation will not make us better. Only through calm discussion can we get the truth that is really useful to consumers. I hope everything can be settled satisfactorily by both sides after calm down.
Weibo-Racing Frappuccino: Oppose to silence by administrative power and interfere with technical discussion and truth discovery on the Internet. If the problems of discussing cars rise to the level of national justice, then domestic cars can’t be criticized at all. How can we make progress? If all you have left is to make up stories to praise the car reviews, do you like to watch them?
(3) Professionals
Bruce Lee, BG CTO of Huawei Terminal, said that "the torque in the same direction is detected at 1.96Nm" mentioned in the official statement: How likely is the torque of 1.96Nm? Many people have no intuitive concept. If the radius of the steering wheel is 0.2 meters, 1.96Nm is equivalent to a total of 1 kg of force applied by both hands to twist the steering wheel, so it is impossible for the driver to twist the steering wheel so hard that he didn’t feel it at that time.
(4) Internet users
Regarding the evaluation, the relevant public opinion is roughly divided into two camps: (1) supporting Yuan Qicong, thinking that the model has problems of rear suspension and chassis instability reflected in the evaluation; (2) Support the enjoyment of the world, and think that car critics are subjectively malicious in slandering the brand.
At the same time, some public opinions have also deviated from the evaluation event itself, and the confrontation of views has shifted to the trial of car companies and the questioning of Yuan Qicong’s own political stance.
The main views of netizens are as follows:
Think that Yuan Qicong maliciously hit the steering wheel.
Deliberately hitting the steering wheel to drive online public opinion, don’t you pursue it?
It turns out that the instinctive shaking can sway to 23 degrees at once. If Mr. Yuan drives a sports car over the speed bump, can he directly hit 90 degrees to make the car drift?
Don’t traditional car critics know that new energy sources have background data? ? ? That’s funny.
Condemn brand evasion
If you can’t solve the problem, solve the person who asked it.
This kind of car company points out that the problem is not improvement, but evasion, and that it is wrong to point out the problem.
Enjoy the world means that drivers can’t interfere with cars when they are out of control?
Condemn the behavior of banning words and deleting videos
Don’t delete other people’s videos if you dare, and don’t ban others.
Two people argue, but they cut off each other’s tongue and don’t let them talk. How can you sell a car behind you?
Regardless of whether he is right or wrong, it is disgusting to cover his mouth before he is convicted.
Query the situation that Weibo does not display "edited" after modifying the content.
Why can you change an article without editing records?
There is no editing record, so it is a good way to cross the sky.
I changed the announcement, but I haven’t edited the record. It’s the only one!
Mention Huawei and BAIC
Why is Xiaomi scolded on the Internet? Because Huawei was blocked.
Hot knowledge: the polar fox enjoying the boundary and deducting the bid is BAIC.
Believe Yuan Qicong
I may doubt others, but I absolutely believe Yuan Qicong.
Originally, it was about a car, but he made random accusations. Judging from Mr. Yuan’s usual Weibo remarks, he knew that he was a patriotic person who sincerely hoped for a good country.
I think Cong really has no problem, not even discussing?
Comment on automobile evaluation
Pheasants have more evaluations, and online celebrity has the final say on whether the results are true or not.
Hurry up and set a standard for car evaluation.
This person seems to specialize in this, which is quite annoying.
Comment on the ethos of car circles
Alas, the atmosphere of the rim is pathetic.
The environment of domestic car companies is not ideal, a little careless, and every step is wrong.
It’s all the ethos brought by the mobile phone industry, and there’s no way out.
03
How do car companies respond to evaluation disputes?
1. the fuel consumption of online celebrity big v equation leopard car reaches 18 liters per 100 kilometers (MJSI:38.72).
At the end of November, 2023, the car big V "Great Qin Jun Shaanxi Group" with more than 1.4 million fans released a video, saying that the fuel consumption of the test equation Leopard 5 reached 18 liters per 100 kilometers, which was far from the official publicity data of Equation Leopard (7.8 liters per 100 kilometers). This topic has aroused concern, and some netizens analyzed that this is the result of testing under extreme working conditions. Not only that, some netizens suggested that the speed of the "Qin Jun Shaanxi Group" was about 180km/h, which was suspected of serious speeding.
On December 2, Guan Wei of Equation Leopard Automobile issued a response statement, saying that the police had collected the relevant vehicle operation data in response to the evidence demand of the case of "Yao Xqiang was suspected of driving a motor vehicle for speeding on November 28, 2023", and the data showed that the vehicle had a lot of abnormal driving behavior that day, "the speed exceeded 180km/h in three time periods".
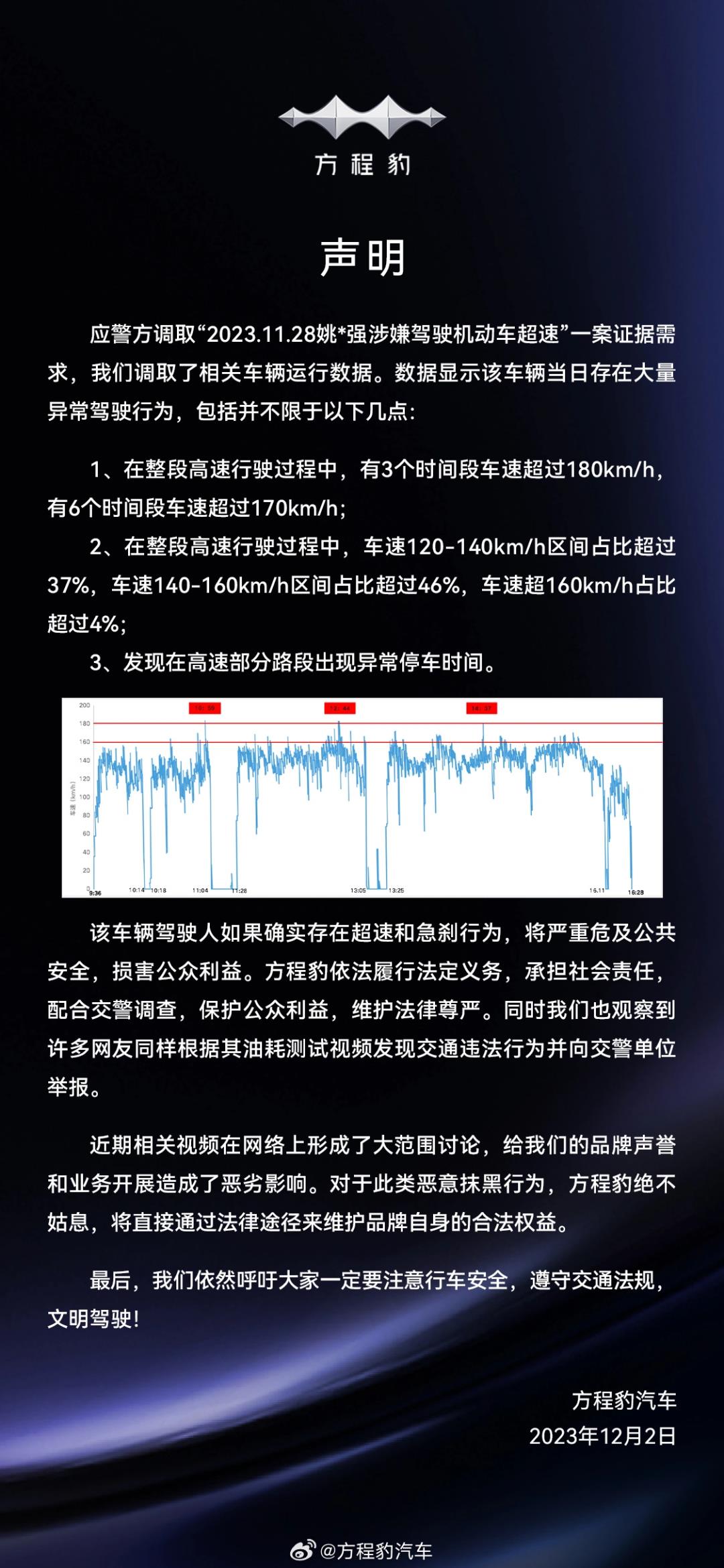
Figure 17: Equation Leopard Response Statement
On the afternoon of December 4th, the "Greater Qin Jun Shaanxi Group" released a video saying that it had contacted the local traffic control department. The local traffic control department criticized and educated him for driving from Weinan to Wuhai on November 28th, and decided to give 200 yuan 3 points because of the speed limit of 80km/h and the actual speed of 103km/h at Wuhai South Ring Road of National Highway 110. Subsequently, the "Greater Qin Jun Shaanxi Group" apologized and said that it would initiate a lawsuit against the behavior of setting charges privately and infringing on personality on the Internet.
On December 6th, Xiong Tianbo, general manager of Equation Leopard Automobile, responded to the question about the authenticity of vehicle data content. "We act according to the law, and the events are all carried out under legal rules. It is not our appeal to create public opinion. It is our current concern to do a good job and serve customers well."
2.AITO responded that the achievement rate of pure battery life in the new M7 "winter test" was at the bottom (MJSI:24.16).
On December 6, 2023, the car platform "Know the Car Emperor" conducted a winter test in Mohe, Heilongjiang Province in 2023, and announced the endurance test results of 19 hybrid vehicles. Among them, the extended-range version of the M7 in Wenjie is at the bottom with a pure battery life achievement rate of 31.6%. In this regard, AITO Automobile released the "Official Interpretation of Winter Test Performance of No Fear of Cold, No Bound Series", pointing out that the test media confirmed that the vehicle had been air-conditioned and heated for a long time before the official test, and there were more than ten times in this process. The operation of opening and closing doors and windows greatly increased the energy consumption of air conditioning, resulting in a rapid decline in power consumption. Under the conditions of extreme cold and continuous heating of air conditioner, windows and doors are opened for many times for a long time, which seriously deviates from the real use scene of users. "Know the car emperor" responded in the live broadcast, all models are subject to unified standards, and there is no situation for a specific car, which does not affect the final ranking.

Figure 18: Statement of Response from the Boundary.
Other car companies should also make a sound assessment. On December 14th, Great Wall Motor held a communication meeting in Beijing to question the winter test standards of Chedi, and responded to the test standards of Chedi in many aspects, such as maintenance standards and electricity standards. Yang Xueliang, senior vice president of Geely, also expressed disagreement with the evaluation results and retrieved background data for explanation.
3. Extreme Krypton executives questioned the unprofessional evaluation of the disassembly of Che Di (MJSI:17.74)
On July 30, 2024, Guan Haitao, a CMO, posted a message in a circle of friends to understand Che Di, calling his evaluation video "too unprofessional". The forwarded video shows that the car emperor said in the evaluation video that Zhijie S7 dismantled the polar krypton 001 and found that the anti-collision beam of the polar krypton 001 was not as good as the 100,000 A class car. Guan Haitao then introduced the front-end safety design of Krypton 001 in Weibo, saying that experts could be arranged to explain it in detail in the future.
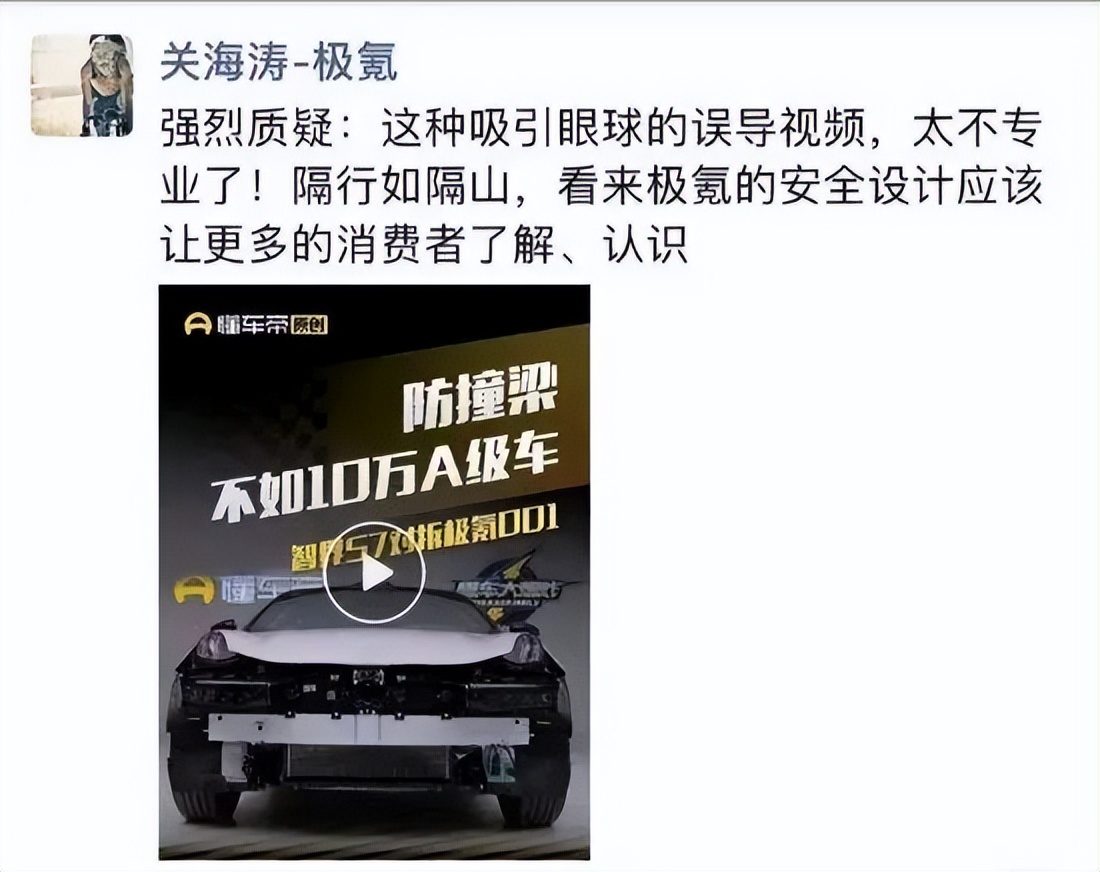
Figure 19: Guan Haitao’s circle of friends sent a message.
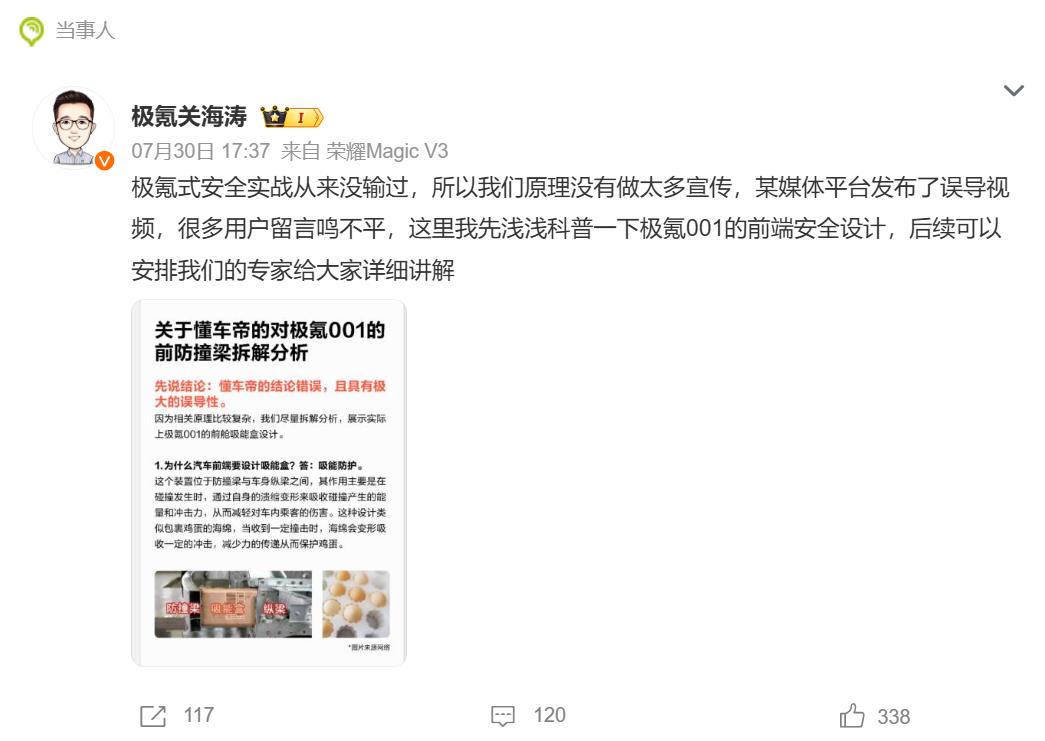
Figure 20: Guan Haitao and Weibo issued a response.
4. The collision test between Xiaomi SU7 and Krypton 001 was questioned (MJSI:19.51).
On August 13th, 2024, car blogger Gao Ruoxiang (ID: Xiang Xiang) released a video titled "When Xiaomi SU7 hit a krypton 007" in bilibili, which aroused widespread concern. The topic # When Xiaomi SU7 hit a krypton 007# was listed on the hot search list.

Figure 21: The car blogger turned out to be Xiangxiang, releasing the evaluation.
On the evening of August 14th, Xiaomi Auto responded in "Xiaomi SU7 Answering a User’s Question (Episode 67)". After analysis, it is considered that this so-called "test" setting is not rigorous, the record is incomplete and the conclusion is unscientific. Xiaomi Automobile stressed that Xiaomi SU7 had undergone a rigorous crash test during the development process, and no safety hazards were found, and called for the vehicle crash test to be conducted by a professional organization.
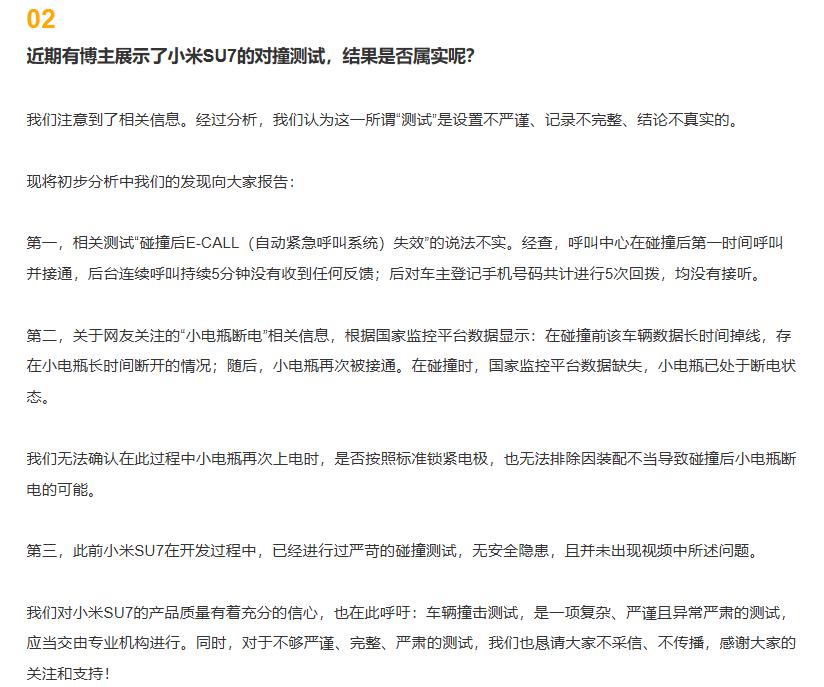
Figure 22: Xiaomi Automobile Response
Subsequently, @ turned out to be Xiangxiang Ah released an apology video, explaining the previously controversial "Millet Crash Video".
On August 15th, the topic of "Xiaomi and Krypton can’t open the back door of collision test" was posted on the hot search. On the evening of August 16th, in response to the rumor of "paid test", Weibo, the Legal Department of @ 中中中中中, issued a document saying that 中中中中中中中中中 has not cooperated with any individual or organization in such test, and in view of the false information, 中2001
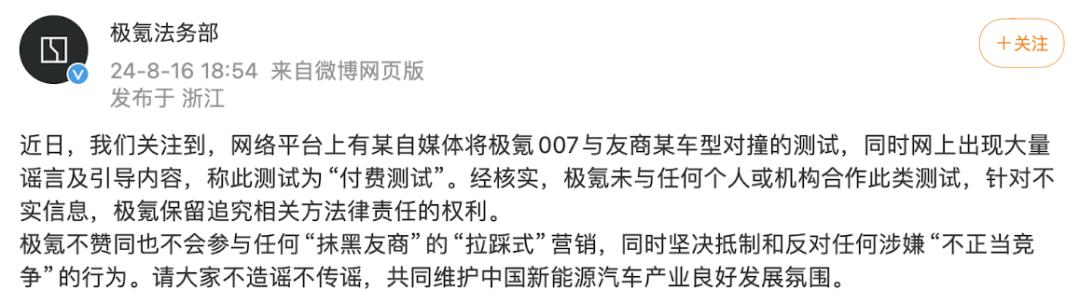
Figure 23: Krypton rumor payment test


























































 Beetle 2013 2.0TSI Top Match")











 Rapid 2013 TDI Basic")
 Rapid 2013 TDI Basic")